引言:从混沌中创造秩序
想象你是一位艺术鉴赏家,正在试图辨别一幅画作是大师真迹还是现代仿品。你仔细观察笔触、色彩、构图,试图找出破绽。与此同时,另一位艺术家正在努力学习大师的风格,试图创作出能骗过你的作品。这是一个永恒的博弈:一方越来越擅长伪造,另一方越来越擅长辨别。
这正是生成对抗网络的核心思想。2014年,Ian Goodfellow 在一个学术研讨会上提出了这个想法,当时有人认为这是"在酒吧里想出来的疯狂主意"。然而,这个"疯狂的主意"彻底改变了生成式人工智能的格局。
第一章:生成问题的本质
在深入 GAN 之前,让我们先理解什么是"生成"问题。假设我们有一个数据集,比如一堆手写数字图片。我们希望创建一个模型,能够生成"看起来像"这些手写数字的新图片。
这个问题有两个核心挑战:
- 数据分布建模: 我们需要学习数据的概率分布 $p_{data}(\mathbf{x})$,其中 $\mathbf{x}$ 表示一个样本。
- 从分布中采样: 一旦我们学到了分布,我们需要能够从中采样来生成新样本。
1.1 传统生成方法
在 GAN 出现之前,研究者已经尝试了多种方法:
自编码器: 先将数据压缩到低维空间,然后试图从低维表示重建原始数据。但这种方法生成的样本往往模糊不清。
玻尔兹曼机: 基于能量函数的方法,通过马尔可夫链蒙特卡洛采样。但训练极其困难,采样效率低。
变分自编码器 (VAE): 通过变分推断近似后验分布。数学上优美,但生成的图像仍然不够真实。
这些方法都有一个共同点:它们试图显式地建模数据分布 $p_{data}(\mathbf{x})$。这就像试图精确描述"什么样的数字图像看起来像真实的",这本身就是一个极其困难的问题。
1.2 GAN 的突破思想
GAN 的革命性在于:不需要显式建模数据分布。
相反,GAN 将生成问题转化为一个对抗游戏:
生成器 (Generator, $G$): 从随机噪声 $\mathbf{z} \sim p_z(\mathbf{z})$ 出发,生成伪造样本 $\tilde{\mathbf{x}} = G(\mathbf{z})$。目标:让判别器无法区分真假。
判别器 (Discriminator, $D$): 接收一个样本 $\mathbf{x}$,判断它是来自真实数据($\mathbf{x} \sim p_{data}$)还是生成器($\tilde{\mathbf{x}} = G(\mathbf{z})$)。输出是概率 $D(\mathbf{x}) \in [0, 1]$。目标:准确区分真假。
这是一个零和博弈:生成器试图最小化判别器的准确率,而判别器试图最大化准确率。当两者达到平衡时,生成器就"学会"了生成真实样本。
z ~ p_z] G[生成器 G] Z --> G G --> Fake[伪造样本 x̃
x̃ = Gz] end subgraph 判别器_Discriminator Real[真实样本 x
x ~ p_data] FakeIn[伪造样本 x̃] D[判别器 D] Real --> D FakeIn --> D D --> Prob[概率 Dx ∈ 0,1] end Fake -.->|输入| FakeIn style Z fill:#FF6B6B,stroke:#FF6B6B,stroke-width:3px,color:#fff style G fill:#4ECDC4,stroke:#4ECDC4,stroke-width:2px,color:#fff style Fake fill:#FFE66D,stroke:#FFE66D,stroke-width:2px,color:#333 style Real fill:#95E1D3,stroke:#95E1D3,stroke-width:3px,color:#333 style D fill:#A8E6CF,stroke:#A8E6CF,stroke-width:2px,color:#333 style Prob fill:#DDA0DD,stroke:#DDA0DD,stroke-width:3px,color:#fff style FakeIn fill:#FFE66D,stroke:#FFE66D,stroke-width:2px,color:#333
图 1:GAN 的架构示意图。生成器将噪声映射为图像,判别器区分真实和伪造样本
第二章:数学框架与目标函数
2.1 极大极小博弈
让我们将这个想法形式化。定义:
- $\mathbf{z} \sim p_z(\mathbf{z})$: 先验噪声分布(通常为高斯分布)
- $\mathbf{x} \sim p_{data}(\mathbf{x})$: 真实数据分布
- $G(\mathbf{z}; \theta_g)$: 生成器,参数为 $\theta_g$
- $D(\mathbf{x}; \theta_d)$: 判别器,参数为 $\theta_d$
判别器的目标是最大化对真实样本正确分类的概率,同时最小化对生成样本的错误分类概率:
$$V(D, G) = \mathbb{E}{\mathbf{x} \sim p{data}(\mathbf{x})}[\log D(\mathbf{x})] + \mathbb{E}_{\mathbf{z} \sim p_z(\mathbf{z})}[\log(1 - D(G(\mathbf{z})))]$$
其中:
- 第一项:判别器对真实样本 $\mathbf{x}$ 输出接近 $1$ 的概率
- 第二项:判别器对伪造样本 $G(\mathbf{z})$ 输出接近 $0$ 的概率
生成器的目标是最小化这个价值函数(让判别器犯错):
$$\min_G \max_D V(D, G)$$
这就是著名的极大极小博弈。
2.2 判别器的最优解
让我们先固定生成器 $G$,求解判别器的最优解。对于任何给定的输入 $\mathbf{x}$,判别器输出 $D(\mathbf{x})$。我们想要最大化对数似然:
$$\max_{D(\mathbf{x})} \left[ p_{data}(\mathbf{x}) \log D(\mathbf{x}) + p_g(\mathbf{x}) \log(1 - D(\mathbf{x})) \right]$$
其中 $p_g(\mathbf{x})$ 是生成样本的分布。
这是一个标量优化问题。对 $D(\mathbf{x})$ 求导并令为零:
$$\frac{d}{dD(\mathbf{x})} \left[ p_{data}(\mathbf{x}) \log D(\mathbf{x}) + p_g(\mathbf{x}) \log(1 - D(\mathbf{x})) \right] = 0$$
$$\frac{p_{data}(\mathbf{x})}{D(\mathbf{x})} - \frac{p_g(\mathbf{x})}{1 - D(\mathbf{x})} = 0$$
$$p_{data}(\mathbf{x})(1 - D(\mathbf{x})) = p_g(\mathbf{x}) D(\mathbf{x})$$
$$p_{data}(\mathbf{x}) - p_{data}(\mathbf{x}) D(\mathbf{x}) = p_g(\mathbf{x}) D(\mathbf{x})$$
$$D^*(\mathbf{x}) = \frac{p_{data}(\mathbf{x})}{p_{data}(\mathbf{x}) + p_g(\mathbf{x})}$$
这是判别器的全局最优解。
直观解释:判别器的输出应该等于"这个样本来自真实数据而非生成数据的概率"。如果 $p_{data}(\mathbf{x})$ 很高而 $p_g(\mathbf{x})$ 很低,那么 $D(\mathbf{x}) \approx 1$;反之则接近 $0$。
2.3 生成器的目标函数
有了最优判别器,我们可以将其代回价值函数:
$$V(G, D^*) = \mathbb{E}{\mathbf{x} \sim p{data}}\left[\log \frac{p_{data}(\mathbf{x})}{p_{data}(\mathbf{x}) + p_g(\mathbf{x})}\right] + \mathbb{E}{\mathbf{x} \sim p_g}\left[\log \frac{p_g(\mathbf{x})}{p{data}(\mathbf{x}) + p_g(\mathbf{x})}\right]$$
这个表达式看起来复杂,但可以简化。注意到:
$$\int [p_{data}(\mathbf{x}) \log \frac{p_{data}(\mathbf{x})}{p_{data}(\mathbf{x}) + p_g(\mathbf{x})} + p_g(\mathbf{x}) \log \frac{p_g(\mathbf{x})}{p_{data}(\mathbf{x}) + p_g(\mathbf{x})}] d\mathbf{x}$$
这可以写成:
$$\mathbb{E}{\mathbf{x} \sim p{data}}\left[-\log 2 - \log \left(\frac{p_{data}(\mathbf{x}) + p_g(\mathbf{x})}{2 p_{data}(\mathbf{x})}\right)\right] + \mathbb{E}{\mathbf{x} \sim p_g}\left[-\log 2 - \log \left(\frac{p{data}(\mathbf{x}) + p_g(\mathbf{x})}{2 p_g(\mathbf{x})}\right)\right]$$
$$= -\log 4 + \text{KL}\left(p_{data} \parallel \frac{p_{data} + p_g}{2}\right) + \text{KL}\left(p_g \parallel \frac{p_{data} + p_g}{2}\right)$$
其中 $\text{KL}$ 是 KL 散度。这个表达式恰好等于:
$$-\log 4 + 2 \cdot \text{JSD}(p_{data} \parallel p_g)$$
其中 JSD 是 Jensen-Shannon 散度。
关键洞察:生成器的目标是最小化 JSD 散度。当 $p_g = p_{data}$ 时,JSD 散度为 $0$,价值函数达到最小值 $-\log 4$。
结论:GAN 的训练目标是让生成分布 $p_g$ 收敛到真实数据分布 $p_{data}$。
2.4 实际训练过程
虽然理论分析很有趣,但实际训练时我们使用交替优化:
固定 $G$,更新 $D$:
- 采样真实数据: ${\mathbf{x}^{(1)}, \ldots, \mathbf{x}^{(m)}} \sim p_{data}$
- 采样噪声: ${\mathbf{z}^{(1)}, \ldots, \mathbf{z}^{(m)}} \sim p_z$
- 生成伪造样本: ${\tilde{\mathbf{x}}^{(1)}, \ldots, \tilde{\mathbf{x}}^{(m)}}, \tilde{\mathbf{x}}^{(i)} = G(\mathbf{z}^{(i)})$
- 梯度上升: $$\nabla_{\theta_d} \frac{1}{m} \sum_{i=1}^{m} \left[\log D(\mathbf{x}^{(i)}) + \log(1 - D(\tilde{\mathbf{x}}^{(i)}))\right]$$
固定 $D$,更新 $G$:
- 采样噪声: ${\mathbf{z}^{(1)}, \ldots, \mathbf{z}^{(m)}} \sim p_z$
- 梯度下降: $$\nabla_{\theta_g} \frac{1}{m} \sum_{i=1}^{m} \log(1 - D(G(\mathbf{z}^{(i)})))$$
实际改进:在实践中,生成器通常最大化 $\log D(G(\mathbf{z}))$ 而不是最小化 $\log(1 - D(G(\mathbf{z})))$,因为后者在训练初期梯度会消失。
第三章:GAN 的架构与实现
3.1 神经网络基础
让我们先回顾多层感知机的基本结构。一个典型的神经网络:
$$\mathbf{h}^{(l)} = \sigma(\mathbf{W}^{(l)} \mathbf{h}^{(l-1)} + \mathbf{b}^{(l)})$$
其中:
- $\mathbf{W}^{(l)} \in \mathbb{R}^{n^{(l)} \times n^{(l-1)}}$: 第 $l$ 层的权重矩阵
- $\mathbf{b}^{(l)} \in \mathbb{R}^{n^{(l)}}$: 第 $l$ 层的偏置向量
- $\sigma(\cdot)$: 激活函数(如 ReLU, sigmoid, tanh)
- $\mathbf{h}^{(0)} = \mathbf{x}$: 输入
- $\mathbf{h}^{(L)}$: 输出
反向传播:训练神经网络的核心是反向传播算法。给定损失函数 $L$,我们使用链式法则计算梯度:
$$\frac{\partial L}{\partial \mathbf{W}^{(l)}} = \frac{\partial L}{\partial \mathbf{h}^{(l)}} \cdot \frac{\partial \mathbf{h}^{(l)}}{\partial \mathbf{z}^{(l)}} \cdot \frac{\partial \mathbf{z}^{(l)}}{\partial \mathbf{W}^{(l)}}$$
其中 $\mathbf{z}^{(l)} = \mathbf{W}^{(l)} \mathbf{h}^{(l-1)} + \mathbf{b}^{(l)}$。
3.2 GAN 的具体实现
让我们看看 GAN 的具体实现。假设我们生成 $64 \times 64$ 的 RGB 图像。
生成器 $G$:
# 输入: 噪声向量 z ∈ R^100
# 输出: 图像 x ∈ R^(64×64×3)
# 第一层: 全连接层 + Reshape
z → Dense(4×4×512) → Reshape(4, 4, 512)
# 上采样层 (使用转置卷积或上采样 + 卷积)
4×4×512 → Conv2DTranspose(256, 5×5, stride=2) → 8×8×256
8×8×256 → BatchNorm → ReLU
8×8×256 → Conv2DTranspose(128, 5×5, stride=2) → 16×16×128
16×16×128 → BatchNorm → ReLU
16×16×128 → Conv2DTranspose(64, 5×5, stride=2) → 32×32×64
32×32×64 → BatchNorm → ReLU
32×32×64 → Conv2DTranspose(3, 5×5, stride=2, activation='tanh') → 64×64×3
判别器 $D$:
# 输入: 图像 x ∈ R^(64×64×3)
# 输出: 概率 D(x) ∈ [0, 1]
64×64×3 → Conv2D(64, 5×5, stride=2, leaky_relu) → 32×32×64
32×32×64 → Dropout(0.3)
32×32×64 → Conv2D(128, 5×5, stride=2, leaky_relu) → 16×16×128
16×16×128 → BatchNorm → Dropout(0.3)
16×16×128 → Conv2D(256, 5×5, stride=2, leaky_relu) → 8×8×256
8×8×256 → BatchNorm → Dropout(0.3)
8×8×256 → Flatten → Dense(1, activation='sigmoid')
关键设计决策:
激活函数选择:
- 判别器: 使用 LeakyReLU 而非 ReLU,避免"死亡神经元"
- 生成器: 使用 tanh 作为输出激活函数(输出范围 $[-1, 1]$)
批归一化 (Batch Normalization):
- 稳定训练,防止梯度爆炸/消失
- 生成器的所有层都使用,判别器的部分层使用
转置卷积 vs 上采样:
- 转置卷积可能导致棋盘格效应
- 现代 GAN 更多使用上采样 + 卷积
3.3 GAN 架构图
z ∈ R^100] --> FC1[全连接层
4×4×512] FC1 --> US1[上采样层
8×8×256] US1 --> US2[上采样层
16×16×128] US2 --> US3[上采样层
32×32×64] US3 --> US4[上采样层
64×64×3] US4 --> X_hat[生成图像
x̃ = Gz] end subgraph 判别器_D X[真实图像
x ∈ R^64×64×3] X_hat_in[生成图像
x̃ = Gz] X --> C1[卷积层
32×32×64] X_hat_in --> C1 C1 --> C2[卷积层
16×16×128] C2 --> C3[卷积层
8×8×256] C3 --> F[展平层] F --> OUT[输出概率
Dx ∈ 0 1] end style Z fill:#FF9500,stroke:#FF9500,stroke-width:3px,color:#ffffff style X fill:#34C759,stroke:#34C759,stroke-width:3px,color:#ffffff style X_hat fill:#FF9500,stroke:#FF9500,stroke-width:2px,color:#ffffff style X_hat_in fill:#FF9500,stroke:#FF9500,stroke-width:2px,color:#ffffff style FC1 fill:#5AC8FA,stroke:#5AC8FA,stroke-width:2px,color:#ffffff style US1 fill:#5AC8FA,stroke:#5AC8FA,stroke-width:1px,color:#ffffff style US2 fill:#5AC8FA,stroke:#5AC8FA,stroke-width:1px,color:#ffffff style US3 fill:#5AC8FA,stroke:#5AC8FA,stroke-width:1px,color:#ffffff style US4 fill:#5AC8FA,stroke:#5AC8FA,stroke-width:1px,color:#ffffff style C1 fill:#AF52DE,stroke:#AF52DE,stroke-width:2px,color:#ffffff style C2 fill:#AF52DE,stroke:#AF52DE,stroke-width:2px,color:#ffffff style C3 fill:#AF52DE,stroke:#AF52DE,stroke-width:2px,color:#ffffff style F fill:#AF52DE,stroke:#AF52DE,stroke-width:1px,color:#ffffff style OUT fill:#FF3B30,stroke:#FF3B30,stroke-width:3px,color:#ffffff
第四章:训练的挑战与解决方案
GAN 的理论虽然优美,但实际训练极其困难。让我们探讨主要挑战和解决方案。
4.1 模式崩溃
问题描述:生成器可能学会只生成少数几种样本,无法覆盖数据分布的多样性。
原因分析:假设判别器对某一类样本输出 $D(\mathbf{x}) \approx 0.5$,生成器发现欺骗判别器最简单的方法是只生成这一类样本。
解决方案:
小批量判别 (Mini-batch Discrimination):
- 让判别器能够判断"一个小批量的样本是否都来自同一分布"
- 特征之间的相似度被纳入考虑
特征匹配 (Feature Matching):
- 生成器不再试图欺骗判别器的输出,而是匹配判别器中间层的统计量
- 目标:让生成样本的激活统计量与真实样本相似
使用不同架构:
- WGAN-GP:使用 Wasserstein 距离
- SNGAN:谱归一化
- BigGAN:自注意力机制
4.2 收敛性问题
问题描述:GAN 的训练是两个网络的对抗,容易陷入不稳定状态。
原因分析:
- 纳什均衡的存在性和可达性
- 两个网络的训练速度不匹配
- 梯度在训练过程中震荡
解决方案:
标签平滑 (Label Smoothing):
- 不使用硬标签 ${0, 1}$,而是使用 ${0.1, 0.9}$
- 防止判别器过度自信
梯度惩罚 (Gradient Penalty):
- WGAN-GP 引入梯度约束
- 目标:让判别器的梯度在真实和生成样本之间保持一致
学习率调度:
- 使用不同的学习率
- 使用衰减学习率
4.3 评估困难
问题描述:GAN 的评估没有统一的标准。不像分类任务有准确率,生成任务的主观性很强。
常用指标:
Inception Score (IS): $$IS(G) = \exp\left(\mathbb{E}_{\mathbf{x} \sim p_g}[\text{KL}(p(y|\mathbf{x}) \parallel p(y))]\right)$$
- 高 IS 意味着生成图像清晰(低熵)且多样化(高熵)
Fréchet Inception Distance (FID): $$FID(p_r, p_g) = |\mathbf{\mu}_r - \mathbf{\mu}_g|^2 + \text{Tr}(\mathbf{\Sigma}_r + \mathbf{\Sigma}_g - 2(\mathbf{\Sigma}_r \mathbf{\Sigma}_g)^{1/2})$$
- 基于 Inception 特征的距离度量
- 越低越好
人类评估:
- 图灵测试式的评估
- 主观但最有说服力
第五章:高级 GAN 架构
5.1 DCGAN:深度卷积生成对抗网络
DCGAN 是第一个稳定训练的 GAN 架构,奠定了后续发展的基础。
关键改进:
使用卷积层而非全连接层:
- 判别器使用步长卷积(strided convolution)代替池化
- 生成器使用转置卷积或上采样
批归一化:
- 在生成器和判别器中都使用
- 稳定训练,防止梯度问题
架构设计:
- 去除全连接层
- 生成器除输出层外使用 ReLU
- 判别器所有层都使用 LeakyReLU
几何直观:卷积操作捕捉空间层次结构,从低级特征(边缘、纹理)到高级特征(形状、物体)。
5.2 WGAN:Wasserstein GAN
WGAN 的核心思想是使用 Wasserstein 距离代替 JS 散度。
Wasserstein 距离(地球移动距离):
$$W(p_r, p_g) = \inf_{\gamma \in \Pi(p_r, p_g)} \mathbb{E}_{(\mathbf{x}, \mathbf{y}) \sim \gamma}[|\mathbf{x} - \mathbf{y}|]$$
其中 $\Pi(p_r, p_g)$ 是所有联合分布的集合,满足边缘分布分别为 $p_r$ 和 $p_g$。
直观解释:将分布 $p_r$ 的"土堆"移动到 $p_g$ 的"坑洞"所需的最小"功"。
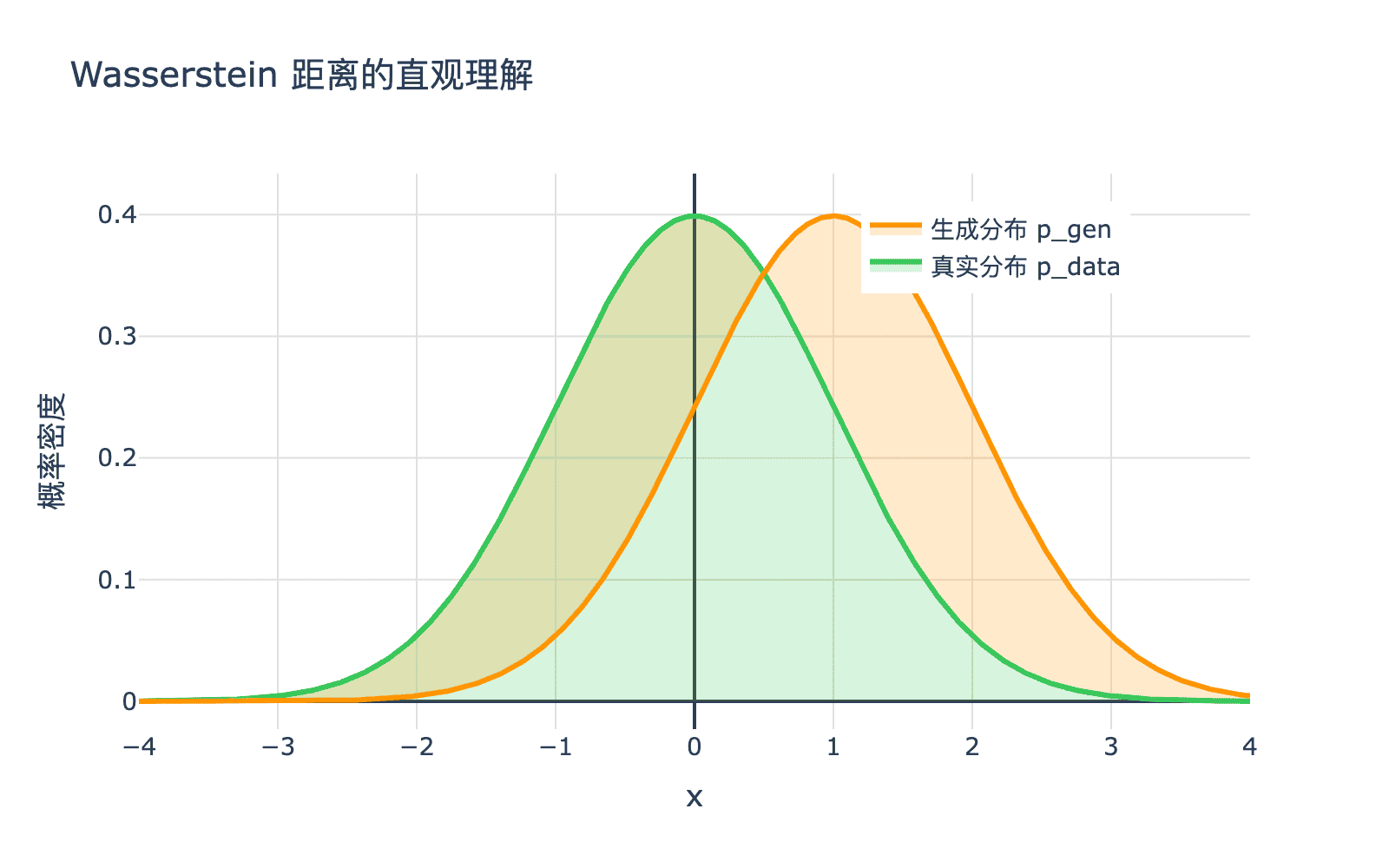
图 2:Wasserstein 距离的几何直观。我们需要将真实分布的质量移动到生成分布的位置,最小化所需的"功"
关键优势:
- 更好的梯度性质:即使分布没有重叠,Wasserstein 距离仍然提供有意义的梯度
- 与训练稳定性相关:判别器的损失可以用于衡量训练进度
WGAN-GP 的改进:
- 使用梯度惩罚代替权重裁剪
- 目标:让判别器的梯度范数接近 $1$
- 更稳定的训练
5.3 SNGAN:谱归一化
SNGAN 通过谱归一化(Spectral Normalization)稳定判别器的训练。
谱归一化的定义:
$$\bar{\mathbf{W}}_{SN} = \frac{\mathbf{W}}{\sigma(\mathbf{W})}$$
其中 $\sigma(\mathbf{W})$ 是权重矩阵 $\mathbf{W}$ 的谱范数(最大奇异值)。
效果:
- 限制判别器的 Lipschitz 常数
- 稳定训练,不需要批归一化
- 适用于各种架构
5.4 JS 散度 vs Wasserstein 距离
理解为什么 Wasserstein 距离比 JS 散度更好,我们需要看它们的性质。
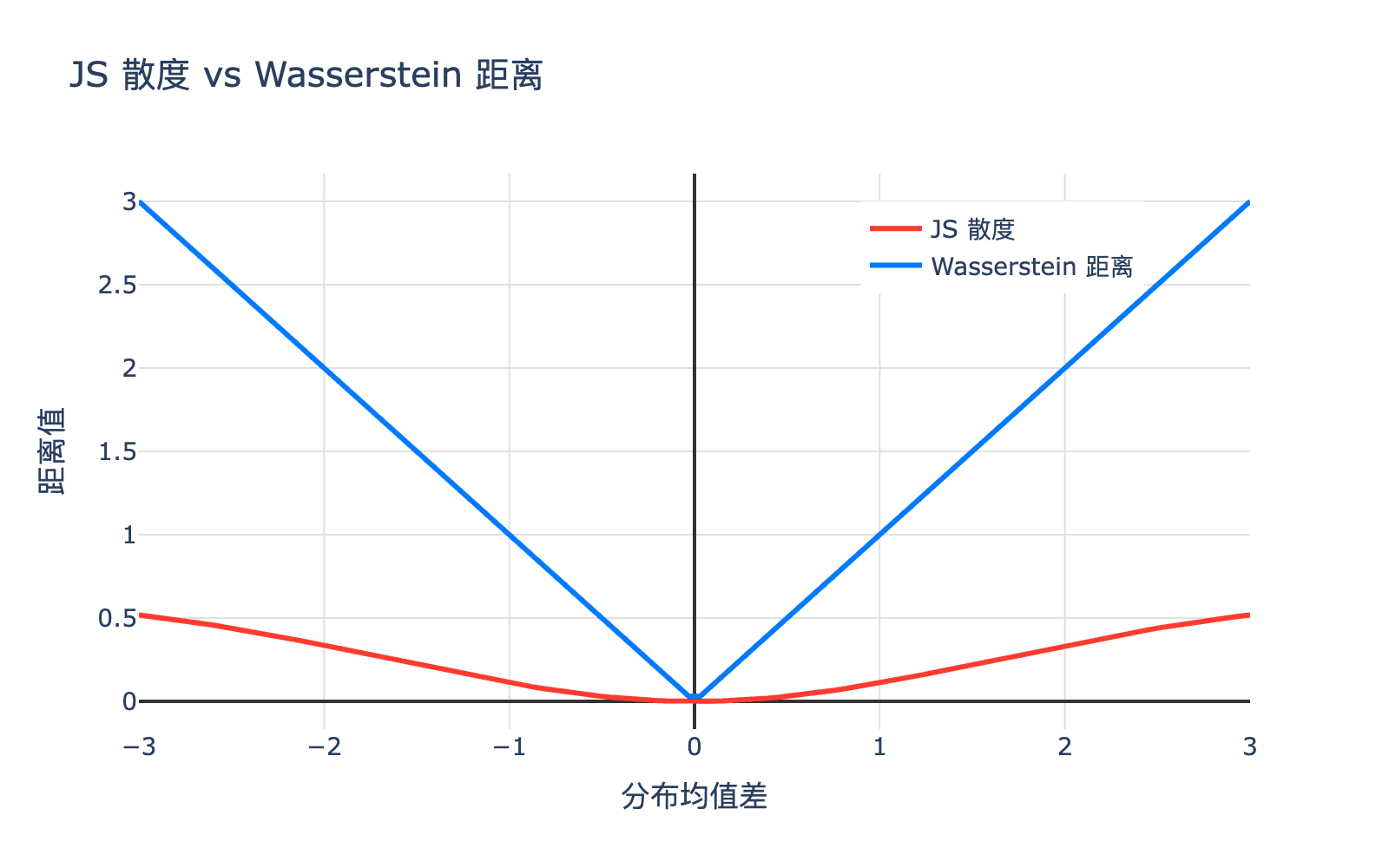
图 3:JS 散度与 Wasserstein 距离的对比。当两个分布没有重叠时,JS 散度饱和而 Wasserstein 距离继续提供有意义的梯度
JS 散度的局限:
- 当 $p_r$ 和 $p_g$ 没有重叠时,JS 散度为 $\log 2$
- 这意味着梯度消失,生成器无法学习
Wasserstein 距离的优势:
- 即使分布没有重叠,仍然提供有意义的梯度
- 与分布的支撑集无关
- 更好的训练稳定性
5.5 StyleGAN:基于风格的生成
StyleGAN 引入了"风格迁移"的思想,将图像分解为风格和内容。
核心思想:
风格编码器:
- 将噪声 $\mathbf{z}$ 映射到风格向量 $\mathbf{w}$
- 风格向量控制图像的高级属性(年龄、姿态等)
自适应实例归一化: $$\text{AdaIN}(\mathbf{x}i, \mathbf{y}) = \mathbf{y}{s,i} \frac{\mathbf{x}_i - \mu(\mathbf{x}_i)}{\sigma(\mathbf{x}i)} + \mathbf{y}{b,i}$$
- 使用风格向量对特征进行归一化
- $\mathbf{y}_s$ 控制尺度,$\mathbf{y}_b$ 控制偏移
潜在空间解耦:
- 将风格空间与潜在空间分离
- 更好的属性可控性
效果:生成极高保真度的人脸图像,支持精细的属性控制。
5.6 条件 GAN
条件 GAN 在生成器中引入条件信息。
架构变化:
$$G(\mathbf{z}, \mathbf{y}) \to \tilde{\mathbf{x}}$$ $$D(\mathbf{x}, \mathbf{y}) \to \text{真/假}$$
其中 $\mathbf{y}$ 是条件信息(类别标签、文本描述等)。
应用场景:
- 文本到图像生成
- 类别条件生成
- 图像到图像翻译
第六章:实际应用
6.1 图像生成与编辑
应用举例:
- 人脸生成:StyleGAN 可以生成逼真的人脸
- 超分辨率:SRGAN 将低分辨率图像提升到高分辨率
- 图像修复:Context Encoders 可以修复图像中的缺失部分
数学原理:GAN 学习数据分布的流形(manifold)。通过在潜空间中插值,可以实现平滑的图像变换。
6.2 图像到图像翻译
Pix2Pix:
- 使用条件 GAN 进行配对图像的翻译
- 应用:语义分割到图像、灰度到彩色、航拍到地图
CycleGAN:
- 无配对数据的图像到图像翻译
- 引入循环一致性损失(cycle consistency loss)
- 应用:马到斑马、夏天到冬天、照片到画作
CycleGAN 的核心思想:
对于两个域 $\mathcal{X}$ 和 $\mathcal{Y}$,定义两个生成器:
- $G: \mathcal{X} \to \mathcal{Y}$
- $F: \mathcal{Y} \to \mathcal{X}$
循环一致性损失:
$$\mathcal{L}{cyc} = \mathbb{E}{\mathbf{x} \sim p_{\mathcal{X}}}[|F(G(\mathbf{x})) - \mathbf{x}|1] + \mathbb{E}{\mathbf{y} \sim p_{\mathcal{Y}}}[|G(F(\mathbf{y})) - \mathbf{y}|_1]$$
直观解释:将图像从 $\mathcal{X}$ 转换到 $\mathcal{Y}$,再转换回 $\mathcal{X}$,应该得到原图。
6.3 文本到图像生成
StackGAN:
- 分阶段生成:先生成粗略草图,再精细化
- 使用文本编码器提取文本特征
AttnGAN:
- 引入注意力机制,关注文本的不同部分
- 更精细的文本-图像对应
数学挑战:
- 文本是离散的,图像是连续的
- 需要将文本编码为连续的潜在向量
6.4 数据增强
GAN 可以用于生成合成数据,增强训练集。
优势:
- 生成与真实数据相似的样本
- 适用于数据稀缺的场景
- 可以控制生成样本的属性
注意事项:
- 生成质量必须足够高
- 避免过度依赖合成数据
- 需要验证合成数据的有效性
第七章:前沿方向与挑战
7.1 大规模 GAN
BigGAN 等架构将 GAN 推向大规模图像生成。
关键改进:
- 使用大模型(数亿参数)
- 批量大小增大(数千)
- 自注意力机制
- 类别条件生成
挑战:
- 计算资源需求极高
- 训练不稳定
- 模式崩溃仍然存在
7.2 3D 生成
GAN 正在扩展到 3D 领域。
应用:
- 3D 物体生成
- 点云生成
- 神经渲染
技术挑战:
- 3D 数据表示(体素、点云、网格)
- 计算复杂度
- 评估标准
7.3 理论突破
GAN 的理论基础仍在发展。
研究方向:
- 收敛性证明:何时 GAN 一定收敛?
- 分布匹配:更好的距离度量
- 稳定性分析:训练稳定性的理论保证
数学挑战:
- 非凸优化问题
- 博弈论与优化的交叉
- 高维空间中的分布性质
7.4 伦理考量
GAN 的强大能力也带来伦理问题。
问题:
- 深度伪造(Deepfake):可以生成虚假的视频和音频
- 隐私:从生成样本推断训练数据
- 偏见:继承训练数据的偏见
应对:
- 检测技术:识别 GAN 生成的内容
- 合规使用:负责任地使用技术
- 公平性:确保生成模型的公平性
第八章:潜空间探索
GAN 的潜空间(latent space)是一个迷人的概念。理解潜空间有助于我们更好地控制和生成图像。
8.1 潜空间的几何结构
生成器的输入空间 $\mathcal{Z}$ 通常是高斯分布 $\mathcal{N}(0, \mathbf{I})$。生成器 $G$ 将这个空间映射到图像空间:
$$G: \mathcal{Z} \to \mathcal{X}$$
关键洞察:
- $\mathcal{Z}$ 中的每个点对应一个图像
- $\mathcal{Z}$ 中的路径对应图像的连续变换
- $\mathcal{Z}$ 中的线性方向对应图像属性的变化
8.2 潜空间插值
潜空间插值是 GAN 最重要的应用之一。给定两个噪声向量 $\mathbf{z}_1$ 和 $\mathbf{z}_2$,我们可以插值:
$$\mathbf{z}(\alpha) = (1-\alpha)\mathbf{z}_1 + \alpha\mathbf{z}_2, \quad \alpha \in [0, 1]$$
生成图像序列:
$$G(\mathbf{z}(\alpha))$$
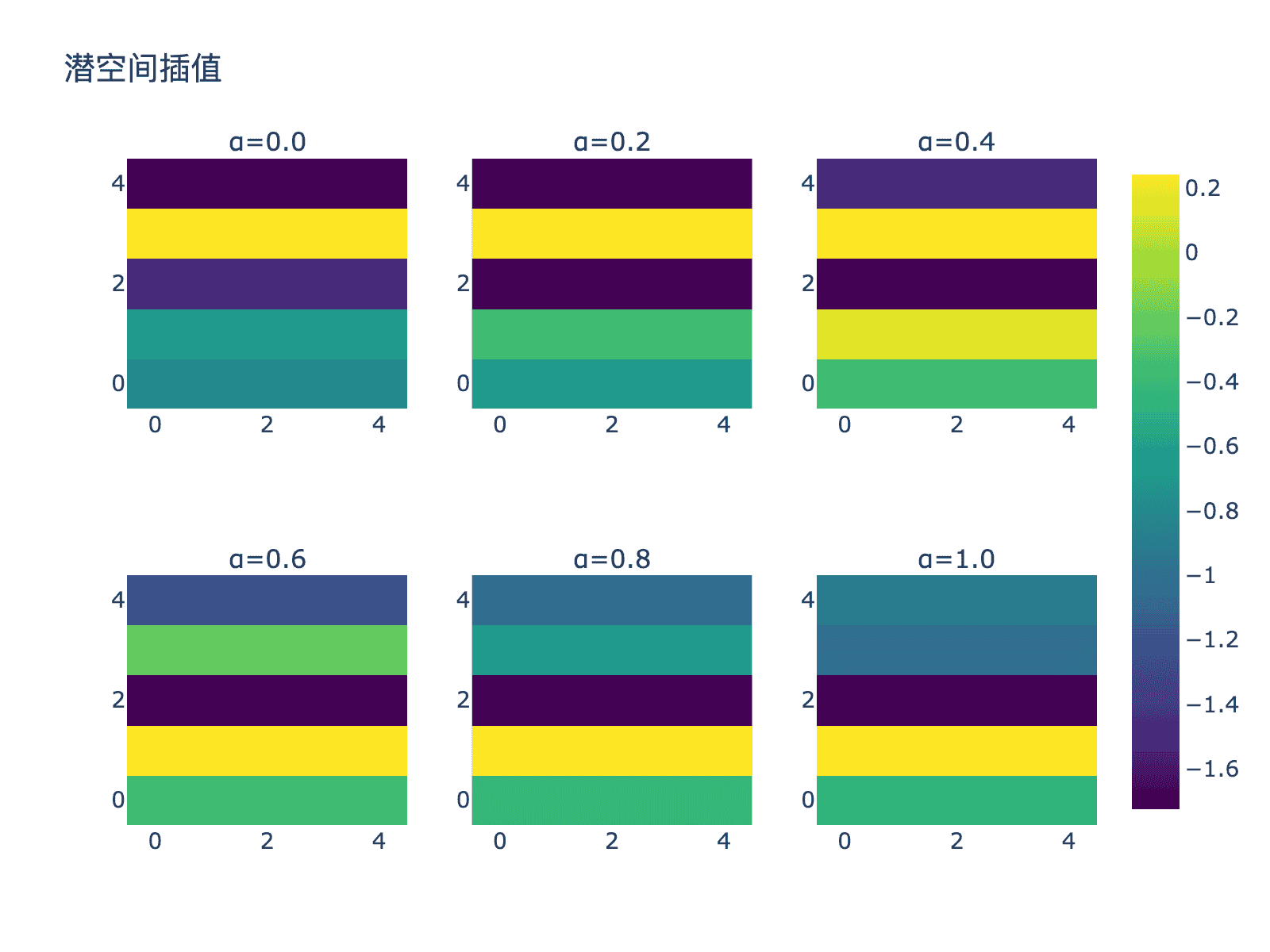
图 4:潜空间插值的可视化。通过在两个噪声向量之间线性插值,我们可以获得从一种图像到另一种图像的平滑过渡
数学解释:
- $\alpha = 0$: 第一张图像 $G(\mathbf{z}_1)$
- $\alpha = 1$: 第二张图像 $G(\mathbf{z}_2)$
- $\alpha \in (0, 1)$: 中间状态的图像
8.3 属性控制
通过在潜空间中移动,我们可以控制图像的特定属性:
$$\mathbf{z}’ = \mathbf{z} + \alpha \mathbf{v}_{\text{attribute}}$$
其中 $\mathbf{v}_{\text{attribute}}$ 是对应某个属性的向量方向。
常见属性:
- 年龄:年轻 $\leftrightarrow$ 年老
- 朝向:左 $\leftrightarrow$ 右
- 发型:长发 $\leftrightarrow$ 短发
- 表情:微笑 $\leftrightarrow$ 严肃
挑战:
- 如何找到属性向量?
- 如何保证属性互不干扰?
- 如何实现精确控制?
第九章:训练实践与技巧
9.1 训练损失曲线
GAN 的训练损失曲线有独特的模式。
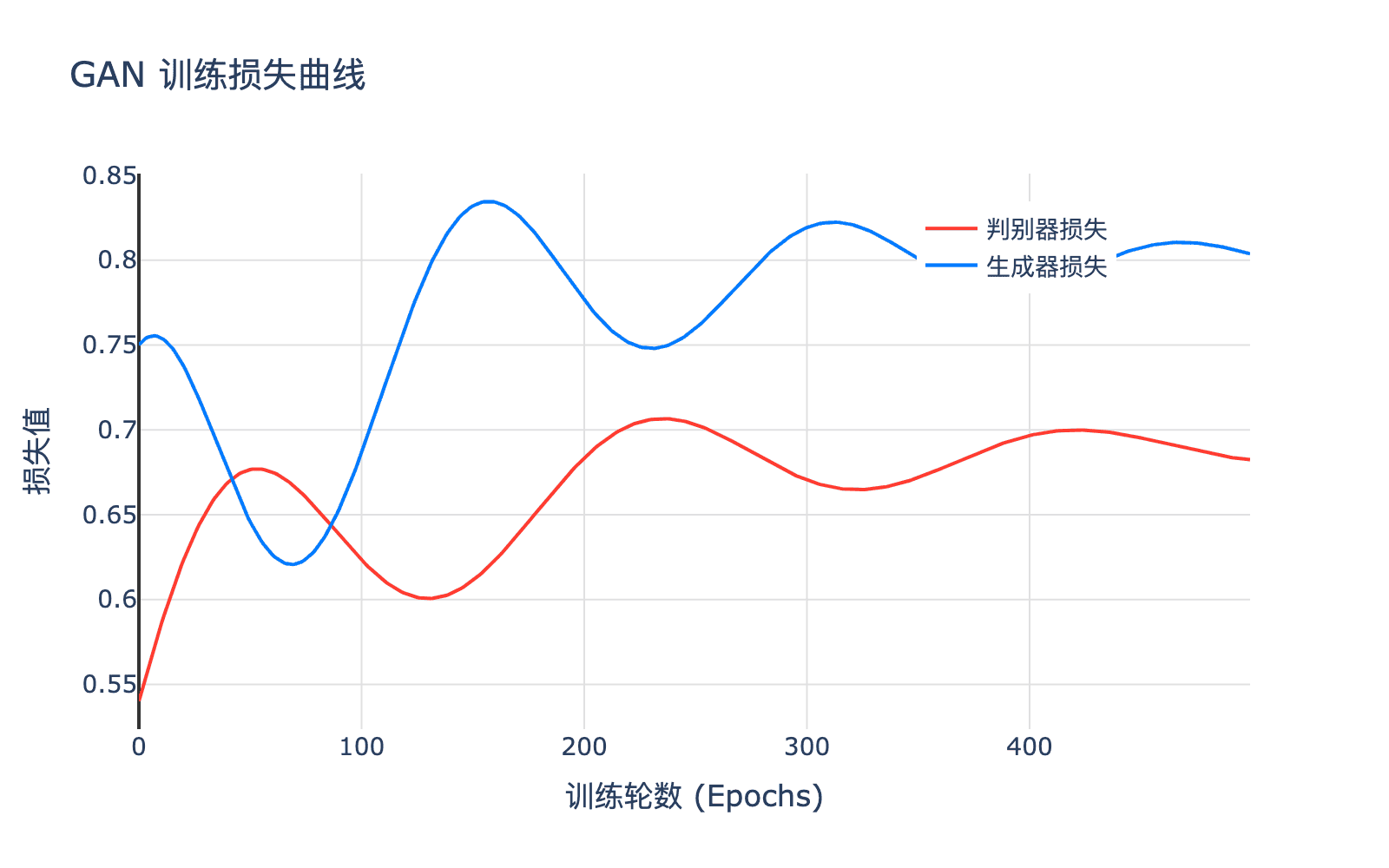
图 5:典型的 GAN 训练损失曲线。判别器和生成器的损失会相互振荡,最终趋于平衡
观察:
- 判别器损失:先下降,然后稳定在某个值附近
- 生成器损失:通常较高,然后缓慢下降
- 震荡:两个网络对抗导致损失振荡
正常 vs 异常:
- 正常:损失合理波动,生成质量逐步提升
- 异常:损失持续上升或趋于零,生成质量退化
9.2 实用技巧
判别器更新频率:
- 通常更新 $k$ 次判别器,再更新 $1$ 次生成器
- 推荐 $k \in [3, 5]$
学习率选择:
- 生成器和判别器可以使用不同学习率
- 推荐: $10^{-4}$ 到 $10^{-3}$
- 使用 Adam 优化器, $\beta_1 = 0.5$ (而非 $0.9$)
噪声分布:
- 推荐:标准高斯分布 $\mathcal{N}(0, \mathbf{I})$
- 维度:通常 $100$ 到 $512$
归一化:
- 输入图像归一化到 $[-1, 1]$
- 使用 tanh 作为生成器输出层激活函数
9.3 调试策略
先训练判别器:
- 暂时固定生成器,训练判别器
- 确保判别器能准确区分真实和伪造样本
检查梯度:
- 使用梯度裁剪或梯度惩罚
- 避免梯度爆炸或消失
监控生成质量:
- 定期保存生成样本
- 观察质量变化趋势
调整超参数:
- 学习率、批大小、网络架构
- 使用网格搜索或贝叶斯优化
结语:博弈与合作的平衡
生成对抗网络的美妙之处在于它将生成问题转化为一个博弈论问题。生成器和判别器在对抗中相互促进,最终达到纳什均衡。
从数学角度看,GAN 最小化生成分布与真实分布之间的距离。从工程角度看,GAN 是两个神经网络的对抗训练。从艺术角度看,GAN 是创造与鉴别的永恒博弈。
但 GAN 的故事远未结束。新的架构、新的理论、新的应用层出不穷。从 DCGAN 到 StyleGAN,从 WGAN 到 BigGAN,每个进展都推动着生成式 AI 的边界。
在这个混沌的世界中,GAN 提供了一种从噪声中创造秩序的方法。就像那位艺术鉴赏家和伪造艺术家的博弈,最终的赢家不是某一方,而是整个系统——一个能够创造逼真世界的系统。
参考文献
- Goodfellow, I., et al. (2014). “Generative Adversarial Nets.” NeurIPS.
- Radford, A., et al. (2015). “Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks.” ICLR.
- Arjovsky, M., et al. (2017). “Wasserstein GAN.” ICML.
- Karras, T., et al. (2018). “Progressive Growing of GANs for Improved Quality, Stability, and Variation.” ICLR.
- Miyato, T., et al. (2018). “Spectral Normalization for Generative Adversarial Networks.” ICLR.
- Zhu, J.-Y., et al. (2017). “Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks.” ICCV.
- Karras, T., et al. (2019). “A Style-Based Generator Architecture for GANs.” CVPR.
- Brock, A., et al. (2018). “Large Scale GAN Training for High Fidelity Natural Image Synthesis.” ICLR.