引言:当机器人遇上几何
想象你正在操控一台工业机械臂。你输入一个目标位置,机械臂的末端执行器精准地移动到那里。这看似简单的动作背后,蕴含着深刻的数学原理。
一个基本问题:如何描述机械臂的姿态?
如果你说"用坐标 $(x, y, z)$ 表示位置,用三个角度表示方向",这没错。但当你尝试在两个姿态之间插值时,问题出现了——简单的线性插值可能导致中间姿态根本不是有效的旋转!
这就是流形约束的体现:机器人的姿态空间不是一个简单的欧几里得空间,而是一个弯曲的流形。
从欧几里得到黎曼
古希腊人认为空间是平坦的。欧几里得几何告诉我们:平行线永不相交,三角形内角和恒为 $180^{\circ}$。
但 $19$ 世纪的数学家们发现,空间可以是弯曲的。高斯研究曲面,黎曼将这一理论推广到任意维度——黎曼几何诞生了。
$20$ 世纪,这些抽象理论找到了惊人应用:
- 爱因斯坦用黎曼几何描述引力(广义相对论)
- 工程师用微分几何控制机器人
- 计算机科学家用流形学习理解高维数据
本文将系统梳理微分几何在机器人学中的应用,从理论基础到现代实践,带你领略这门数学如何赋能智能机器。
第一章:李群与李代数——描述运动的数学语言
1.1 刚体运动的困境
在三维空间中,刚体的位姿(位置和方向)需要几个参数描述?
- 位置:$3$ 个参数 $(x, y, z)$
- 方向:至少需要 $3$ 个参数(如欧拉角)
欧拉角的陷阱:经典的万向节锁(Gimbal Lock)问题——当俯仰角为 $90^{\circ}$ 时,偏航和滚转失去独立意义。这说明用欧拉角表示旋转存在本质缺陷。
更优雅的选择是旋转矩阵:一个 $3 \times 3$ 的正交矩阵 $R$,满足 $R^T R = I$ 且 $\det(R) = 1$。
所有这样的矩阵构成特殊正交群 $\text{SO}(3)$(Special Orthogonal Group)。
1.2 李群的引入
李群(Lie Group)是一种特殊的数学结构,它同时具有两种性质:
- 群结构:可以定义乘法(旋转的合成)和逆元(反向旋转)
- 流形结构:局部看起来像欧几里得空间,可以定义微积分
$\text{SO}(3)$ 就是一个李群。类似的,描述刚体完整位姿(旋转 $+$ 平移)的特殊欧几里得群 $\text{SE}(3)$ 也是李群。
$$T = \begin{pmatrix} R & \mathbf{t} \ \mathbf{0}^T & 1 \end{pmatrix} \in \text{SE}(3)$$
其中 $R \in \text{SO}(3)$ 是旋转矩阵,$\mathbf{t} \in \mathbb{R}^3$ 是平移向量。
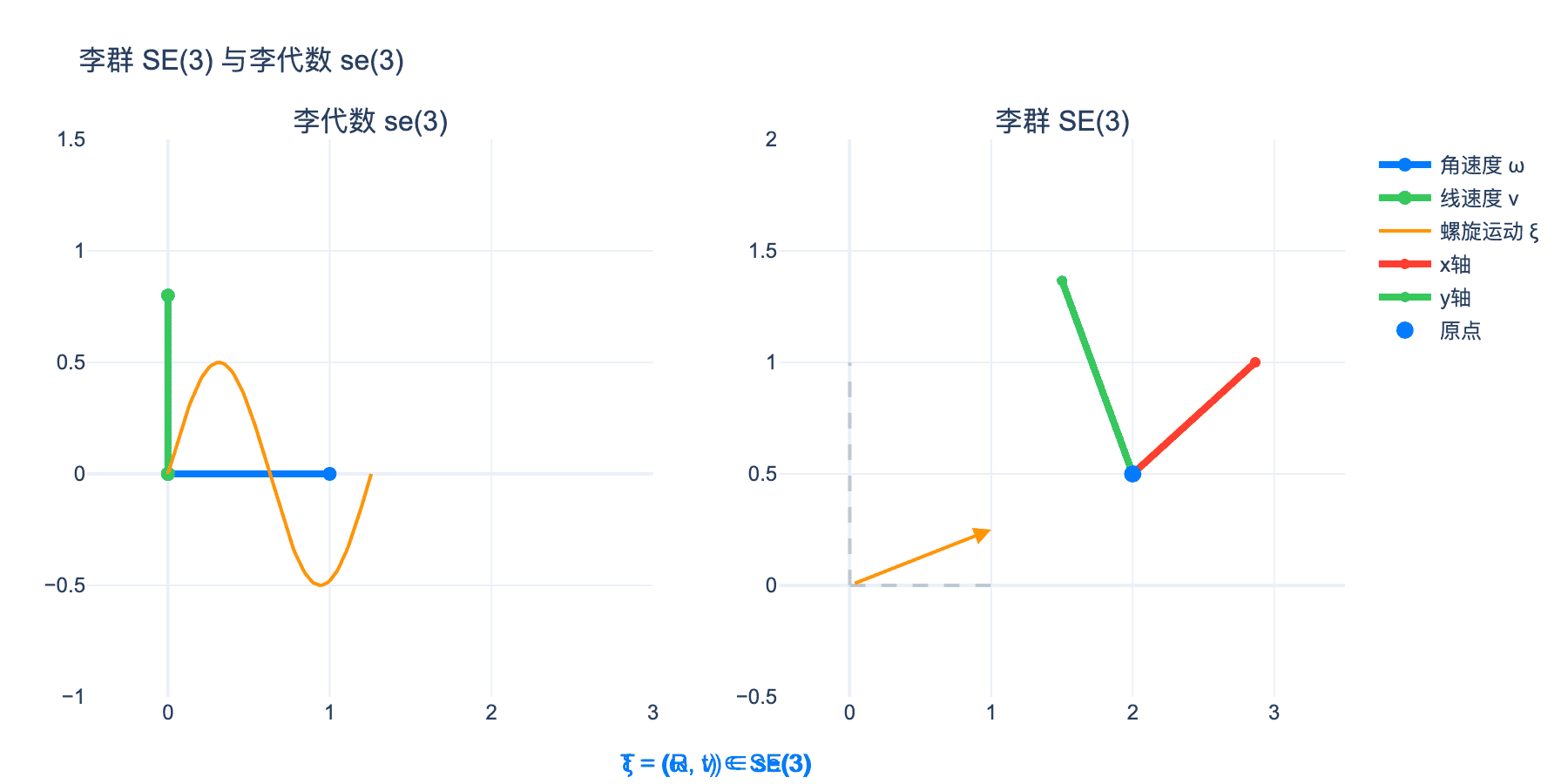
图1:李代数 se(3) 中的螺旋运动(左)与李群 SE(3) 中的刚体变换(右)。指数映射将切空间中的速度映射为流形上的姿态。
1.3 李代数:李群的切空间
李群是弯曲的流形,但它在每一点都有一个切空间——局部看是平坦的。
在李群的单位元(恒等变换)处的切空间称为李代数(Lie Algebra):
- $\text{SO}(3)$ 的李代数是 $\mathfrak{so}(3)$
- $\text{SE}(3)$ 的李代数是 $\mathfrak{se}(3)$
$\mathfrak{so}(3)$ 的具体形式:
$$\Omega = \begin{pmatrix} 0 & -\omega_z & \omega_y \ \omega_z & 0 & -\omega_x \ -\omega_y & \omega_x & 0 \end{pmatrix}$$
这是一个反对称矩阵,由三维向量 $\mathbf{\omega} = (\omega_x, \omega_y, \omega_z)$ 唯一确定。物理上,$\mathbf{\omega}$ 就是角速度。
1.4 指数映射与对数映射
李代数和李群之间通过指数映射(Exponential Map)连接:
$$\exp: \mathfrak{so}(3) \to \text{SO}(3)$$
对于 $3 \times 3$ 反对称矩阵,这就是著名的罗德里格斯公式(Rodrigues’ Formula):
$$R = \exp(\Omega) = I + \frac{\sin\theta}{\theta}\Omega + \frac{1-\cos\theta}{\theta^2}\Omega^2$$
其中 $\theta = |\mathbf{\omega}|$ 是旋转角度。
直观理解:
- 李代数:速度空间(角速度 $\mathbf{\omega}$)
- 李群:姿态空间(旋转矩阵 $R$)
- 指数映射:积分速度,得到姿态变化
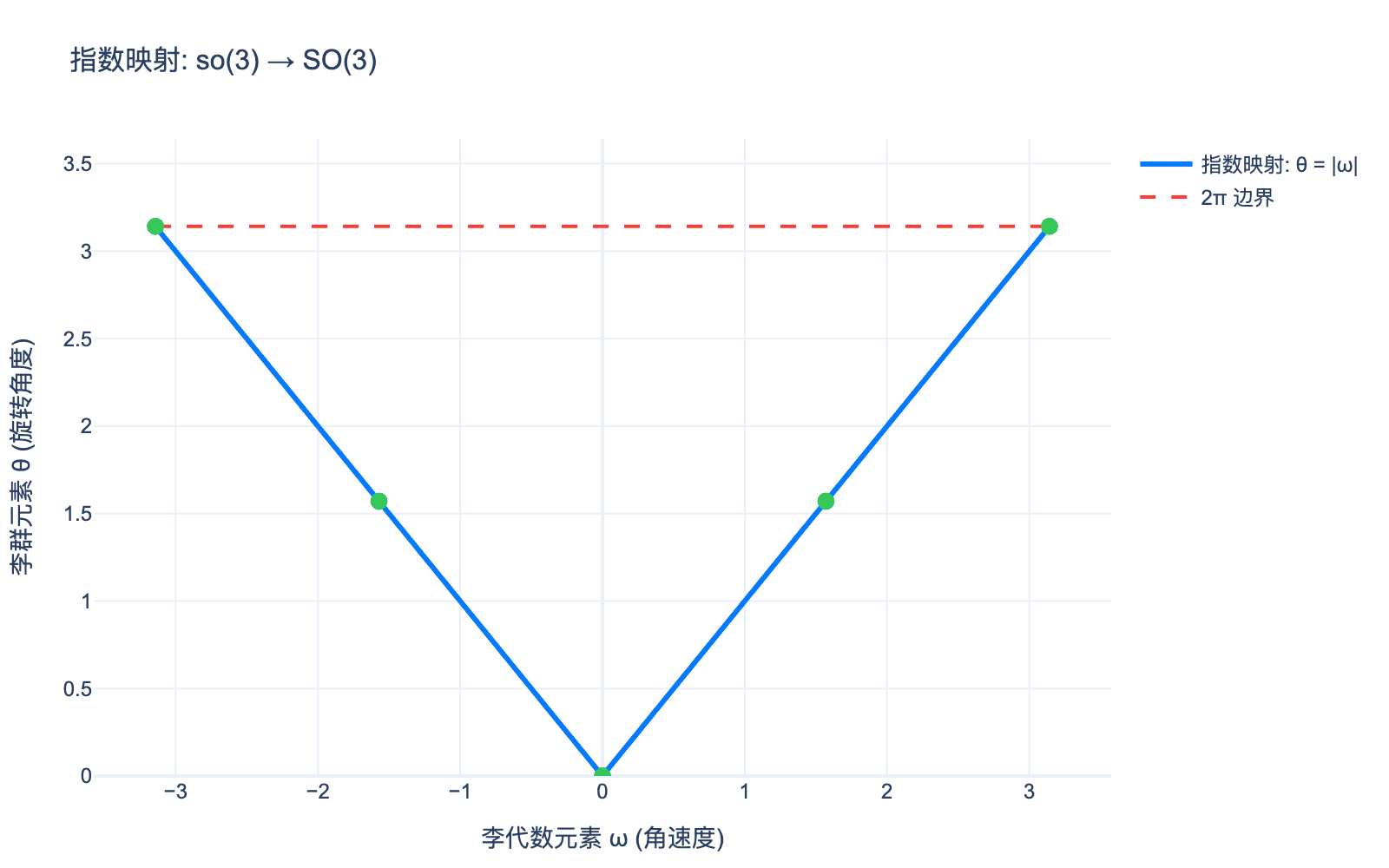
图2:指数映射将李代数中的角速度映射为李群中的旋转角度。小角度时近似线性,大角度时呈现周期性。
逆映射称为对数映射:
$$\Omega = \log(R)$$
给定旋转矩阵 $R$,可以提取旋转轴和角度:
$$\theta = \arccos\left(\frac{\text{tr}(R) - 1}{2}\right)$$
$$\mathbf{\omega} = \frac{1}{2\sin\theta} \begin{pmatrix} R_{32} - R_{23} \ R_{13} - R_{31} \ R_{21} - R_{12} \end{pmatrix}$$
1.5 为什么这很重要?
关键洞察:在李代数空间中进行线性运算(如加法、插值),然后通过指数映射回到李群,这样得到的变换始终在流形上。
对比两种旋转插值方法:
错误方法(线性插值): $$R(t) = (1-t)R_1 + tR_2$$
问题:$R(t)$ 可能不是旋转矩阵(不正交,或行列式不为 $1$)。
正确方法(测地线插值):
- 计算相对旋转:$R_{12} = R_1^T R_2$
- 取对数:$\mathbf{\omega}{12} = \log(R{12})$
- 插值:$\mathbf{\omega}(t) = t \cdot \mathbf{\omega}_{12}$
- 指数映射:$R(t) = R_1 \exp(\mathbf{\omega}(t))$
结果:$R(t)$ 始终是有效的旋转矩阵,且路径是"最短"的(测地线)。
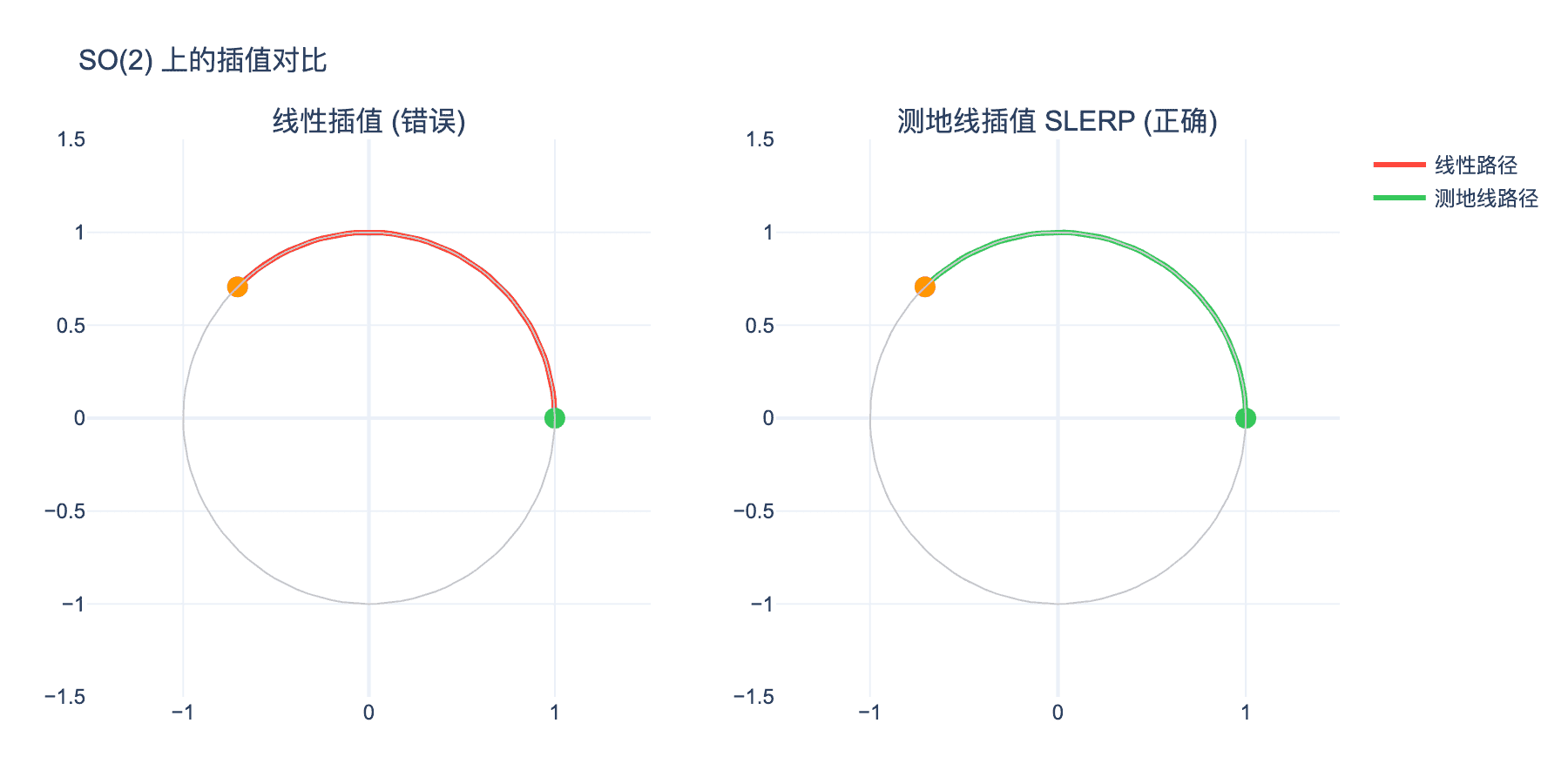
图3:SO(2) 上的插值对比。线性插值(左,红色)偏离流形(单位圆),而测地线插值(右,绿色)始终保持在流形上。
第二章:机器人运动学——从关节空间到任务空间
2.1 运动学问题
机器人运动学研究几何关系,不考虑力和质量。核心问题有两个:
前向运动学(Forward Kinematics):给定关节角度 $\mathbf{\theta}$,求末端执行器位姿 $T$。
逆向运动学(Inverse Kinematics):给定目标位姿 $T$,求关节角度 $\mathbf{\theta}$。
对于串联机械臂,前向运动学是李群元素的乘积:
$$T_{0n}(\mathbf{\theta}) = e^{\mathbf{\xi}_1 \theta_1} e^{\mathbf{\xi}_2 \theta_2} \cdots e^{\mathbf{\xi}n \theta_n} T{0n}(0)$$
其中 $\mathbf{\xi}_i$ 是第 $i$ 个关节的螺旋轴(在李代数中)。
2.2 雅可比矩阵
当机器人运动时,关节角速度如何映射为末端执行器的速度?这就是雅可比矩阵(Jacobian)的作用。
$$\mathbf{V} = J(\mathbf{\theta}) \dot{\mathbf{\theta}}$$
其中:
- $\dot{\mathbf{\theta}} \in \mathbb{R}^n$ 是关节空间速度
- $\mathbf{V} \in \mathbb{R}^6$ 是任务空间速度(线速度 $+$ 角速度)
- $J(\mathbf{\theta}) \in \mathbb{R}^{6 \times n}$ 是雅可比矩阵
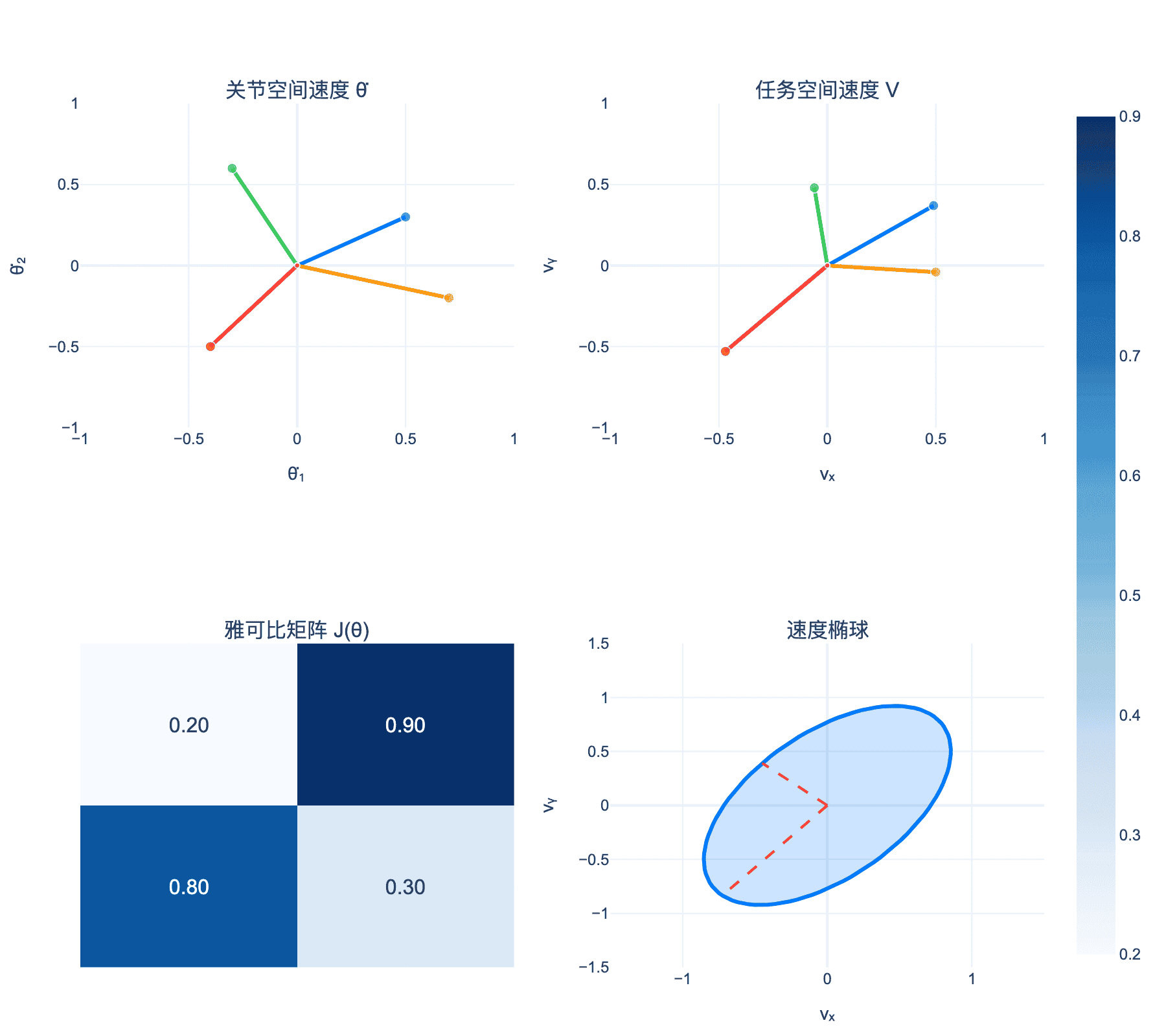
图4:雅可比矩阵将关节空间速度映射到任务空间速度,并定义了可操作性椭球,反映机器人在各方向上的运动能力。
几何视角:雅可比矩阵的列向量是各关节轴在末端执行器处的螺旋运动:
$$J = \begin{pmatrix} | & | & & | \ \mathbf{\xi}_1’ & \mathbf{\xi}_2’ & \cdots & \mathbf{\xi}_n’ \ | & | & & | \end{pmatrix}$$
2.3 可操作性与速度椭球
雅可比矩阵的奇异值分解(SVD)揭示了机器人的运动能力:
$$J = U \Sigma V^T$$
其中 $\Sigma = \text{diag}(\sigma_1, \sigma_2, \ldots, \sigma_6)$ 包含奇异值。
速度椭球:单位关节速度 $|\dot{\mathbf{\theta}}| = 1$ 映射到任务空间形成一个椭球:
$${\mathbf{V} : \mathbf{V} = J\dot{\mathbf{\theta}}, |\dot{\mathbf{\theta}}| = 1}$$
椭球的半轴长度就是奇异值 $\sigma_i$,方向由 $U$ 的列向量给出。
可操作性度量:
$$\mu = \sqrt{\det(J J^T)} = \sigma_1 \sigma_2 \cdots \sigma_6$$
当机器人处于奇异位形时,至少一个奇异值为零,可操作性 $\mu = 0$。
2.4 关节空间与任务空间的映射
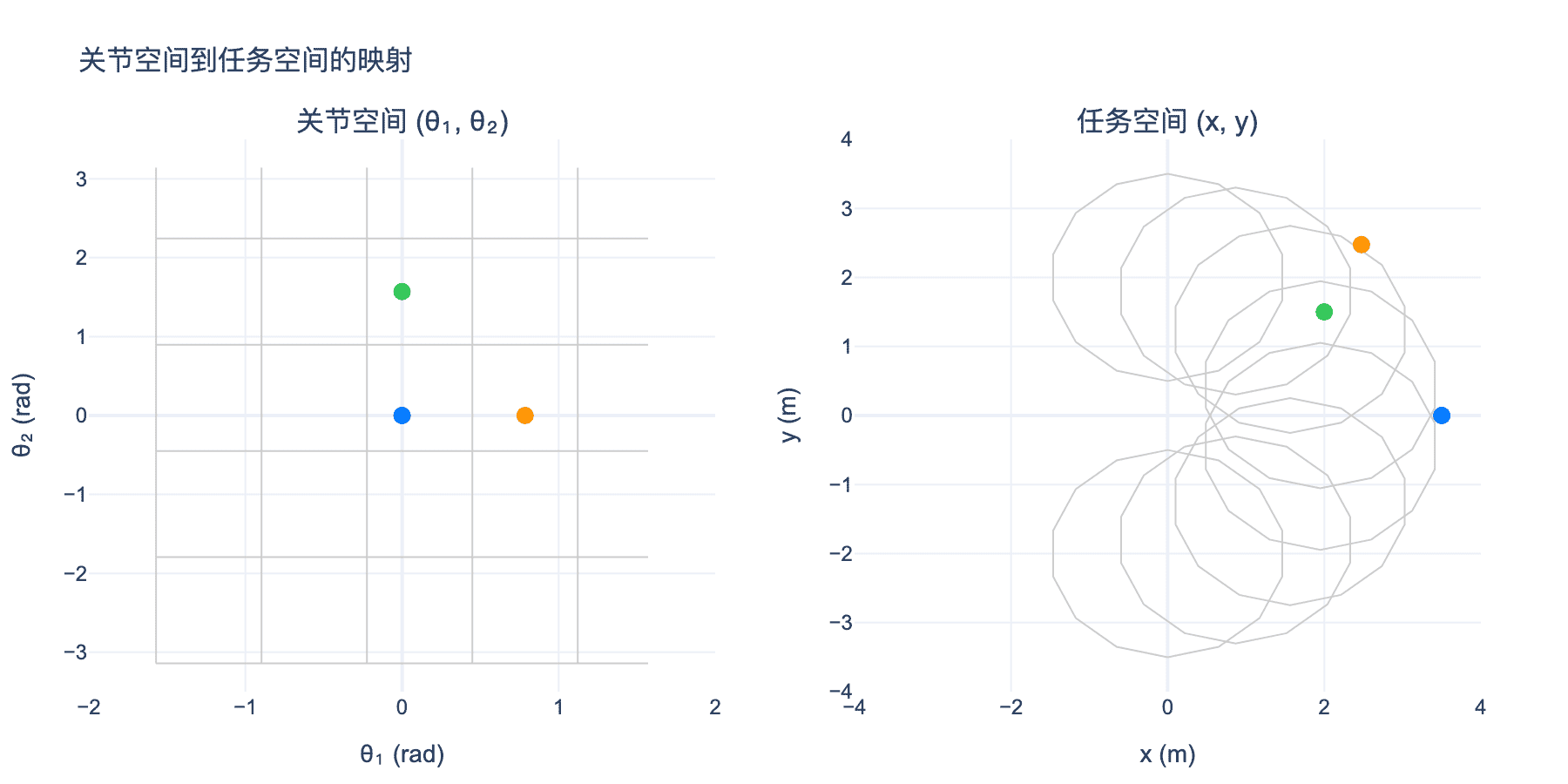
图5:2关节机械臂的关节空间(左)与任务空间(右)映射。网格线在映射下发生扭曲,反映了非线性变换的几何特性。
从图中可以看到:
- 关节空间是简单的矩形区域
- 任务空间呈现出复杂的边界
- 某些区域的映射是一一对应的,而另一些区域(如奇异点附近)是多对一的
第三章:机器人动力学——黎曼几何视角
3.1 从运动学到动力学
运动学回答"在哪里",动力学回答"如何运动"。考虑质量、惯性和外力,我们需要动力学方程。
经典的欧拉-拉格朗日方程:
$$\frac{d}{dt}\frac{\partial L}{\partial \dot{\mathbf{q}}} - \frac{\partial L}{\partial \mathbf{q}} = \mathbf{\tau}$$
其中 $L = T - V$ 是拉格朗日量,$T$ 是动能,$V$ 是势能,$\mathbf{\tau}$ 是广义力。
对于机器人,这可以写成标准的操作空间动力学形式:
$$M(\mathbf{q})\ddot{\mathbf{q}} + C(\mathbf{q}, \dot{\mathbf{q}})\dot{\mathbf{q}} + \mathbf{g}(\mathbf{q}) = \mathbf{\tau}$$
3.2 质量矩阵作为度量张量
观察质量矩阵 $M(\mathbf{q})$,它具有以下性质:
- 对称:$M = M^T$
- 正定:$\mathbf{v}^T M \mathbf{v} > 0$ 对所有非零 $\mathbf{v}$
- 依赖于构型:$M = M(\mathbf{q})$
这不正是黎曼度量的定义吗?
关键洞见:机器人的构型空间配备了自然的黎曼度量 $M(\mathbf{q})$。在这个几何框架下:
- 动能:$T = \frac{1}{2}\dot{\mathbf{q}}^T M(\mathbf{q}) \dot{\mathbf{q}}$
- 测地线:无外力时的自然运动轨迹
- 克里斯托费尔符号:由 $M$ 的导数定义,出现在科里奥利力项中
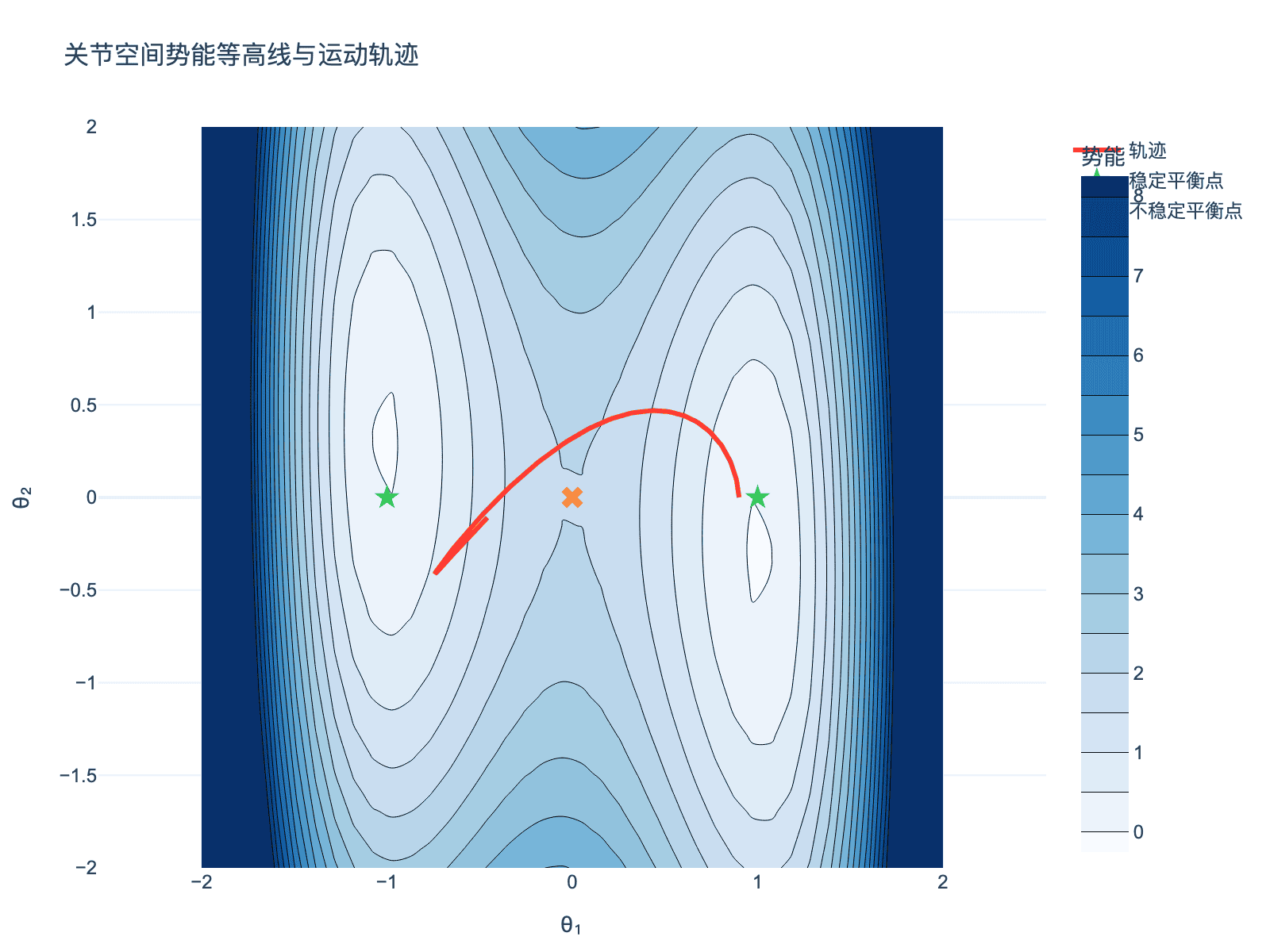
图6:关节空间的势能等高线(双势阱模型)。星号标记稳定平衡点,叉号标记不稳定平衡点。红色曲线展示了一个阻尼振荡轨迹。
3.3 测地方程与动力学
在黎曼流形上,测地线满足测地方程:
$$\ddot{q}^i + \Gamma^i_{jk}\dot{q}^j\dot{q}^k = 0$$
其中 $\Gamma^i_{jk}$ 是克里斯托费尔符号:
$$\Gamma^i_{jk} = \frac{1}{2}g^{il}\left(\frac{\partial g_{lj}}{\partial q^k} + \frac{\partial g_{lk}}{\partial q^j} - \frac{\partial g_{jk}}{\partial q^l}\right)$$
对比机器人动力学方程:
$$M\ddot{\mathbf{q}} + C\dot{\mathbf{q}} = 0$$
(假设无重力和外力)
可以发现,科里奥利力项 $C\dot{\mathbf{q}}$ 正好对应克里斯托费尔符号的贡献!
3.4 力控制与阻抗控制
问题:如何让机器人与环境交互时表现柔顺?
阻抗控制: $$\mathbf{\tau} = M(\mathbf{\theta})\ddot{\mathbf{\theta}}_d + C(\mathbf{\theta}, \dot{\mathbf{\theta}})\dot{\mathbf{\theta}}_d + \mathbf{g}(\mathbf{\theta}) + K_p(\mathbf{\theta}_d - \mathbf{\theta}) + K_d(\dot{\mathbf{\theta}}_d - \dot{\mathbf{\theta}})$$
几何视角:在李群框架下,误差计算必须在李代数中进行: $$\mathbf{e} = \log(T_d^{-1} T)$$
而不是简单的欧几里得减法。
第四章:轨迹规划与优化——测地线与测地流
4.1 轨迹规划问题
给定起点 $\mathbf{q}{\text{start}}$ 和终点 $\mathbf{q}{\text{goal}}$,寻找一条可行的轨迹:
- 满足运动学约束
- 避障
- 优化某些性能指标(如时间、能量)
4.2 测地线作为最优路径
在黎曼流形上,测地线是局部最短路径。如果构型空间没有障碍物,测地线就是最优轨迹。
对于旋转,这意味着球面线性插值(SLERP):
$$R(t) = R_0 \exp(t \log(R_0^T R_1))$$
而不是简单的线性插值: $$R(t) = (1-t)R_0 + t R_1 \quad \text{(错误!)}$$
后者产生的矩阵甚至不是有效的旋转(不正交)。
4.3 RRT 与基于采样的规划
在流形上的 RRT:
- 在切空间中采样
- 使用指数映射投影回流形
- 确保边是测地线段
扩展 RRT*:
- 利用黎曼度量计算路径代价
- 重新布线以优化总成本
4.4 最优控制与泛函极值
最小化能量泛函: $$J = \int_0^T \frac{1}{2} \dot{\mathbf{\theta}}^T M(\mathbf{\theta}) \dot{\mathbf{\theta}} , dt$$
欧拉-拉格朗日方程给出最优轨迹,这导出了测地线方程!
第五章:SLAM与状态估计——流形上的概率分布
5.1 SLAM问题
同步定位与地图构建(SLAM)是机器人学的核心问题:
- 机器人在未知环境中移动
- 同时估计自身位姿和构建环境地图
- 利用传感器(相机、激光雷达、IMU等)观测
5.2 流形上的状态估计
传统卡尔曼滤波假设状态在欧几里得空间中。但机器人的位姿 $T \in \text{SE}(3)$ 位于流形上!
错误做法: $$T_{k+1} = T_k + \Delta T$$
问题:$T_{k+1}$ 可能不在 $\text{SE}(3)$ 上。
正确做法: $$T_{k+1} = T_k \cdot \exp(\Delta \mathbf{\xi})$$
其中 $\Delta \mathbf{\xi} \in \mathfrak{se}(3)$ 是李代数增量,$\exp$ 是指数映射。
5.3 流形上的概率分布
如何在流形上定义高斯分布?
方法:在切空间中定义
对于点 $\bar{T} \in \text{SE}(3)$,在其切空间中定义高斯分布:
$$\mathbf{\xi} \sim \mathcal{N}(\mathbf{0}, \Sigma)$$
然后通过指数映射得到流形上的分布:
$$T = \bar{T} \cdot \exp(\mathbf{\xi})$$
这就是聚焦高斯(Concentrated Gaussian)。
5.4 李群上的卡尔曼滤波
预测步骤: $$\hat{T}{k|k-1} = \hat{T}{k-1|k-1} \cdot \exp(\Delta t \cdot \mathbf{v}k)$$ $$\Sigma{k|k-1} = F_k \Sigma_{k-1|k-1} F_k^T + Q_k$$
更新步骤: $$K_k = \Sigma_{k|k-1} H_k^T (H_k \Sigma_{k|k-1} H_k^T + R_k)^{-1}$$ $$\mathbf{\xi}k = K_k \mathbf{y}k$$ $$\hat{T}{k|k} = \hat{T}{k|k-1} \cdot \exp(\mathbf{\xi}_k)$$
5.5 Bundle Adjustment
视觉 SLAM 中的光束法平差(Bundle Adjustment)是一个非线性最小二乘问题:
$$\min_{T, X} \sum_{i,j} \rho\left(|\mathbf{u}_{ij} - \pi(T_i, X_j)|^2\right)$$
关键:优化在 $\text{SE}(3)$ 的切空间进行,使用李代数参数化位姿增量。
第六章:机器人实例分析
6.1 工业机械臂——UR5
UR5 是一个典型的 6 自由度串联机械臂。
运动学结构:
- 6 个旋转关节
- 腕部球关节(3 个相交轴)
- 满足 Pieper 准则:逆运动学有解析解
使用李群方法:
- 分解位置与方向问题
- 利用腕部几何特性
- 最多 8 个解析解
6.2 并联机器人——Delta 机器人
Delta 机器人使用并联机构实现高速拾取。
结构特点:
- 3 个主动臂 + 3 个从动臂
- 末端执行器始终保持水平
- 闭环约束
雅可比矩阵 $J$ 将关节速度与末端速度关联: $$\mathbf{V} = J \dot{\mathbf{q}}$$
但由于闭环约束,$J$ 不是方阵。
6.3 足式机器人——四足机器人
四足机器人(如 Spot、ANYmal)的运动涉及复杂的接触动力学。
浮动基座:
- 6 个自由度的浮动基座(位置和方向)
- 每个腿 3 个关节
- 总位形空间:$\mathbb{R}^3 \times \text{SO}(3) \times (S^1)^9$
零空间运动: 雅可比矩阵 $J_c$ 描述接触约束: $$J_c \dot{\mathbf{q}} = 0$$
零空间 $\mathcal{N}(J_c)$ 中的运动保持接触,用于姿态调整。
第七章:现代发展——深度学习与机器人几何
7.1 几何深度学习
传统深度学习处理欧几里得数据。但机器人数据常定义在非欧几里得空间:
- 点云($3$D 坐标集合)
- 网格(图结构)
- 位姿序列(流形上的轨迹)
SE(3) 等变网络:设计网络结构,使其对输入的 $\text{SE}(3)$ 变换保持等变。
7.2 视觉-惯性里程计
VIO 融合相机和 IMU 数据进行状态估计。
状态空间: $$\mathbf{x} = (\mathbf{p}, \mathbf{v}, \mathbf{q}, \mathbf{b}_a, \mathbf{b}_g) \in \mathbb{R}^3 \times \mathbb{R}^3 \times \text{SO}(3) \times \mathbb{R}^3 \times \mathbb{R}^3$$
扩展卡尔曼滤波:
- 状态传播:$\mathbf{x}_{k+1} = f(\mathbf{x}_k, \mathbf{u}_k)$
- 误差在李代数中计算
- 协方差在切空间中传播
7.3 学习黎曼度量
能否让机器人自己学习适合任务的度量?
度量学习(Metric Learning)从数据中学习距离函数:
$$d_M(\mathbf{x}, \mathbf{y}) = \sqrt{(\mathbf{x}-\mathbf{y})^T M (\mathbf{x}-\mathbf{y})}$$
对于机器人,可以学习:
- 构型空间度量 $M(\mathbf{q})$
- 任务相关的距离
- 考虑人类演示的偏好
第八章:实践工具与实现
8.1 常用的数学库
Sophus(C++):
- 实现 SO(3)、SE(3) 及其李代数
- 指数/对数映射
- 方便的运算符重载
manif(C++):
- 轻量级流形库
- 支持多种李群
- 自动微分兼容
GeoTorch(Python/PyTorch):
- 神经网络中的约束优化
- 流形上的梯度下降
- 适用于学习算法
8.2 数值注意事项
旋转表示的选择:
| 表示 | 优点 | 缺点 |
|---|---|---|
| 旋转矩阵 | 无奇异,直接复合 | 9个参数,约束多 |
| 四元数 | 4个参数,插值方便 | 双覆盖,$q$ 和 $-q$ 等价 |
| 欧拉角 | 直观 | 万向节锁 |
| 李代数 | 优化友好 | 需要指数映射 |
推荐:内部计算用旋转矩阵或四元数,优化问题用李代数。
积分旋转:
更新旋转: $$R_{k+1} = R_k \exp([\mathbf{\omega}]_\times \Delta t)$$
而不是: $$R_{k+1} = R_k + \dot{R} \Delta t \quad \text{(不正交!)}$$
结语:几何之美,实用之真
回顾我们的旅程:
- 李群与李代数为描述刚体运动提供了优雅的数学框架
- 雅可比矩阵揭示了几何映射的局部线性结构
- 黎曼度量赋予了构型空间丰富的几何结构
- 测地线连接了最优轨迹与微分几何
- 流形上的概率让状态估计在正确的空间进行
- 几何深度学习将现代 AI 与经典几何结合
为什么微分几何如此重要?
本质原因:机器人系统的状态空间天然是流形。忽视这一点会导致:
- 无效的插值结果
- 数值不稳定
- 次优的规划
- 错误的概率模型
而拥抱几何,我们获得:
- 全局有效的表示
- 数值稳定的算法
- 几何直观的设计
- 理论保证的正确性
给读者的建议
如果你希望深入这个领域:
数学基础:
- 线性代数(矩阵分解、特征值)
- 多元微积分(链式法则、梯度)
- 微分几何(流形、张量、联络)
实践技能:
- 学习李群库(如 Sophus、Manif)
- 实现简单的运动学和动力学
- 在真实或仿真机器人上测试
前沿方向:
- 几何深度学习
- 学习-based 控制
- 多机器人协同
微分几何不仅仅是抽象的数学,它是理解机器人世界、构建智能系统的基石。从刚体姿态的描述,到复杂环境的导航,从单机器人的控制,到群体机器人的协调——几何无处不在。
希望这篇综述为你打开了通往机器人几何世界的大门。
附录:重要公式速查
李群与李代数
SO(3) 的指数映射(罗德里格斯公式): $$R = \exp(\Omega) = I + \frac{\sin\theta}{\theta}\Omega + \frac{1-\cos\theta}{\theta^2}\Omega^2$$
SE(3) 的指数映射: $$T = \exp(\mathbf{\xi}^\wedge) = \begin{pmatrix} \exp(\Omega) & V\mathbf{v} \ \mathbf{0}^T & 1 \end{pmatrix}$$
其中 $V = I + \frac{1-\cos\theta}{\theta^2}\Omega + \frac{\theta-\sin\theta}{\theta^3}\Omega^2$。
雅可比矩阵
速度映射: $$\mathbf{V} = J(\mathbf{\theta})\dot{\mathbf{\theta}}$$
可操作性: $$\mu = \sqrt{\det(J J^T)}$$
动力学
欧拉-拉格朗日方程: $$M(\mathbf{q})\ddot{\mathbf{q}} + C(\mathbf{q}, \dot{\mathbf{q}})\dot{\mathbf{q}} + \mathbf{g}(\mathbf{q}) = \mathbf{\tau}$$
延伸阅读:
- Murray, Li, and Sastry. A Mathematical Introduction to Robotic Manipulation. CRC Press, 1994.
- Bullo and Lewis. Geometric Control of Mechanical Systems. Springer, 2005.
- Sola et al. “A micro Lie theory for state estimation in robotics.” arXiv:1812.01537, 2018.
- Absil et al. Optimization Algorithms on Matrix Manifolds. Princeton University Press, 2008.
愿你的机器人在弯曲的空间中,走出优美的轨迹。